Estimation d’aires avec la méthode de Monte Carlo
Activités #7
Table des matières
- 1. Introduction
- 2. Méthode de Monte Carlo pour approximer π KEY
- 3. Polygones dans la suite du TP/projet
- 4. Génération de polygones
- 5. Approximation de l’aire d’un polygone simple
- 6. Calcul exact de l’aire d’un polygone simple
- 7. Simulations : aire approchée versus aire exacte
- 8. Plus de polygones réguliers BONUS
- 9. Utilisation de data frame BONUS
1. Introduction
1.1. Principe du TP/projet
Ce TP/projet doit vous servir de support afin de rendre un rapport. Il est fortement conseillé de lire TOUT le TP/projet avant de le commencer.
Il s’agit d’un RAPPORT: vous ne devez pas seulement écrire du code, vous devez également le COMMENTER (à l’intérieur du code et à l’extérieur), faire attention aux NOMS des fonctions et des variables que vous utilisez (utilisez obligatoirement les noms donnés dans l’énoncé, choisissez des noms EXPLICITES pour vos variables et fonctions supplémentaires). Pensez à rédiger une introduction, une conclusion, et à faire des paragraphes pour vos explications.
Il est également essentiel de TESTER chacun des programmes que vous faites, d’expliquer vos tests, ainsi que les résultats que vous avez obtenu (ces résultats correspondaient-ils aux résultats que vous attendiez ? Vous devez faire part d’un esprit critique, aussi n’hésitez pas à mentionner si vous vous attendiez à d’autres résultats que ceux obtenus…). Faire des tests à l’intérieur d’un programme peut également vous aider à trouver vous-même votre erreur lorsqu’un programme ne fonctionne pas: pensez-y !
Si vous êtes bloqué à une question, parlez-en à vos professeurs (il est donc important de commencer le TP/projet le plus rapidement possible). Si, malgré tout, vous restez bloqués, expliquez ce qui vous a bloqué, n’hésitez pas également à exposer les idées que vous aviez pour la suite mais n’avez pas pu mettre en oeuvre. Certaines questions faciles ne nécessitent pas d’avoir fait la totalité des questions précédentes pour être faites: lisez donc bien l’intégralité du TP/projet. Le plus important n’est pas de faire la totalité du TP/projet, mais de faire BIEN ce que vous faites.
La qualité de la rédaction et la lisibilité du code seront prises en compte.
1.2. But du TP/projet et dépendance entre les sections
Le but de ce TP/projet est d’utiliser la méthode de Monte Carlo pour calculer une valeur approchée de l’aire d’un polygone. Afin de se familiariser avec la méthode, on se propose de l’utiliser dans un premier temps pour calculer une valeur approchée de π: cette première partie est indépendante du reste du TP/projet.
Ce TP/projet est long. Il est indispensable que:
- vous fassiez la totalité de la section 2 (méthode de Monte Carlo pour approximer π: estimation, simulations, calcul de l’erreur, représentation des résultats),
- vous compreniez la façon dont sont représentés les polygones (section 3: si cette partie vous bloque, vous ne pourrez pas faire la suite),
- vous fassiez la section 4 (dessin d’un polygone), qui est très facile et permet de tester si vous avez compris la section 3.
Pour la suite, il est à noter que:
- la section 5 (génération de polygones) n’est pas indispensable pour faire la suite du TP/projet, mais il est conseillé de l’utiliser à la fin des sections suivantes pour tester vos résultats,
- la section 6 est le coeur du TP/projet: la section 6.2 (définition de la fonction
appartient) est difficile, et cette fonction est utilisée dans la section 6.3. Sans cette fonction, vous ne pourrez pas calculer l’aire approchée d’un polygone. TOUTEFOIS, cela ne vous empêche pas de:- répondre aux questions de la sous-partie « Principe » de la section 6.3 (ces questions ne sont pas liées à la programmation, elles sont là pour vérifier que vous avez compris le but du TP/projet),
- définir une fonction
dessin_simupour laquelle les points sont tous de la même couleur, qu’ils soient à l’intérieur ou à l’extérieur du polygone.
- la section 7 (sur l’aire exacte) peut être faite indépendamment de la section 6 (hormis la devinette initiale),
- pour la section 8, il est indispensable d’avoir fait au préalable les sections 1, 6 et 7.
Il est important de tester les fonctions que vous programmez. De ce fait, le but du TP/projet n’est pas d’arriver à la fin de la section 8 (même si, évidemment, votre note risque d’être bien meilleure dans ce cas…), mais AVANT TOUT de faire BIEN ce que vous faites (commentaires, rédaction, tests, etc.) et de savoir répondre correctement aux questions faciles qui sont disséminées tout au long du TP/projet.
1.3. Rendu du projet KEY
Le projet sera rendu dans une boîte de dépôt JALON sous la forme d’une archive ZIP contenant :
- Un fichier texte
READMEcomprenant les noms du binôme (NOM1etNOM2) et quelques informations essentielles sur le projet. - Le rapport au format PDF (au plus 10 pages) nommé
NOM1_NOM2.pdf. Veuillez lire ce document pour préparer et écrire le rapport. - Un dosser
srccontenant les fichiers source du projet commentés. Le dossiersrcdoit au moins contenir un fichiermain.R.
Le fichier main.R proposera une petite demonstration du projet. Attention, il est essentiel que le fichier main.R s’exécute sans erreur.
Ces instructions doivent impérativement être respectées.
2. Méthode de Monte Carlo pour approximer π KEY
2.1. Estimation de π
- Méthode de Monte Carlo
Lire la partie « Détermination de la valeur de π » dans l’article wikipédia sur Méthode de Monte Carlo. Il est écrit « la probabilité que le point M appartienne au disque est π/4. » : détailler le calcul aboutissant à la valeur pi/4.
- Questions préliminaires
- Comment tirer uniformément au hasard
npoints dans un rectangle ? Indication: utiliser la primitiverunif, qui permet de tirer uniformément au hasard un ou plusieurs points dans un intervalle. - Comment faire pour savoir si un point de coordonnées
(x,y)appartient ou non au cercle de centre(0,0)et de rayonR?
- Comment tirer uniformément au hasard
- Programmation
Définir une fonction
mc.piqui prend en argument un entiern, et renvoie une valeur approchée de π, obtenue à l’aide de la méthode de Monte Carlo, et avecnpoints tirés uniformément au hasard.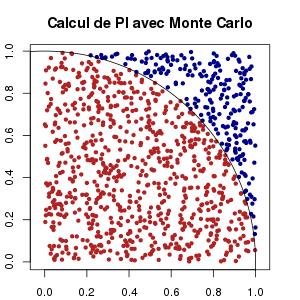
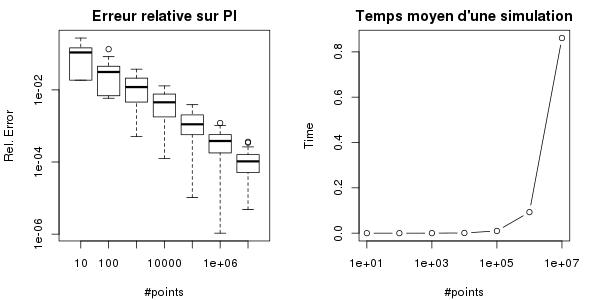
2.2. Simulations avec n=10**j, pour j=1:p
- Estimations
Dans cette section, vous allez définir une matrice
PIEde taillet*p(avect=50etp=7), contenant des estimations de π. Plus précisément, la coordonnée(i,j)dePIE(avec1<=i<=tet1<=j<=p) doit contenir une estimation de π effectuée avecn=10**jpoints. Ainsi, la j-ième colonne dePIEcontienttestimations de π, toutes effectuées avecn=10**jpoints. Toutes les estimations seront faites de façon indépendante les unes des autres. - Temps moyen
Dans cette section, vous allez définir un vecteur
tEde taillepcontenant le temps moyen mis pour obtenir de telles estimations. Plus précisément, la j-ième coordonnée du vecteurtE(avec1<=j<=p) doit contenir le temps moyen mis pour effectuer une estimation de π, chacune de ces estimations étant effectuée avecn=10**jpoints.Indication: utiliser la primitive
system.time, qui renvoie le temps mis pour évaluer un expression donnée et la primitivereplicatequi répète l’évaluation d’une expression.system.time(replicate(100, sum(1:1000))) vec <- matrix(0, 2,5) system.time(vec[1,] <- runif(5)) system.time(vec[2,] <- runif(5)) print(vec)
utilisateur système écoulé 0.001 0.000 0.001 utilisateur système écoulé 0 0 0 utilisateur système écoulé 0 0 0 [,1] [,2] [,3] [,4] [,5] [1,] 0.6916834 0.001697275 0.9038988 0.6834348 0.9710516 [2,] 0.4069787 0.408694030 0.2347155 0.2954508 0.6385711 - Erreur relative
Quelle est la formule pour l’erreur relative entre une valeur et son estimation ? Définir une matrice
ERRde taillet*pdont la coordonnée(i,j)est l’erreur relative entre π et son estimationPIE[i,j]. - Représentation des résultats
Utiliser le code suivant pour:
- représenter sur un dessin la distribution de l’erreur relative
ERRen fonction du nombre de pointsnutilisés pour l’estimation, - représenter le temps moyen
tEen fonction du nombrende points utilisés pour la simulation.
ERR <- abs(PIE/pi - 1) par(mfrow=c(1,2),mar=c(4,4,2,2)+0.1) boxplot(ERR, main='Erreur relative sur PI', log='y', xlab='#points', ylab='Rel. Error') plot(10 ** (1:p), tE, type='b', main='Temps moyen d\'une simulation', log='x', xlab='#points', ylab='Time')
- représenter sur un dessin la distribution de l’erreur relative
2.3. Autres méthodes d’estimation de π BONUS
Instruisez vous avec la page wikipedia sur PI. Comparer la qualité des estimations obtenues avec la méthode de Monte Carlo avec :
- les représentations fractionnaires,
- les séries,
- les produits,
- les formules mathématiques,
- …
N’oubliez pas qu’un ordinateur effectue des calcul approchés sur les nombres réels.
3. Polygones dans la suite du TP/projet
3.1. Définition d’un polygone simple
La suite du TP/projet utilise cette méthode dite de Monte Carlo, mais dans le but d’approximer l’aire d’un polygone. Un polygone est une figure géométrique plane, formée d’une suite cyclique de segments consécutifs. Les polygones considérés sont des polygones simples (c’est-à-dire dont les arêtes ne se croisent pas), par opposition au cas des polygones complexes qui n’est pas traité ici. Notez bien que les polygones considérés ne sont pas nécessairement convexes.
3.2. Représentation d’un polygone sous forme de matrice
Dans la suite, on décrira un polygone à n côtés à l’aide d’une matrice de taille (n+1)*2. Plus pécisément, le polygone constitué des segments [(x_1,y_1);(x_2,y_2)], [(x_2,y_2);(x_3,y_3)], …, [(x_n,y_n);(x_1,y_1)] sera représenté par une matrice M telle que:
- M[i,1] = x_i et M[i,2] = y_i pour tout i compris entre 1 et n,
- M[n+1,1] = M[1,1] = x_1 et M[n+1,2] = M[1,2] = y_1.
On notera que:
- chaque ligne de la matrice
Mreprésente un sommet du polygone; - l’ordre dans lequel sont données les lignes est important, car un segment du polygone correspond à deux points consécutifs (autrement dit deux lignes consécutives);
- la dernière ligne de la matrice est toujours identique à la première ligne: cette redondance d’information va permettre d’alléger le code par la suite.
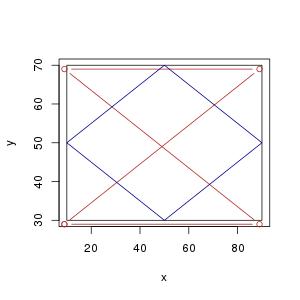
Par exemple, on pourra utiliser le code suivant pour définir des polygones.
## Definition d'une fonction très utile creer_polygone <- function (x,y) { matrix(c(x, x[1], y, y[1]), ncol=2,dimnames=list(c(), c("x","y"))) } carre <- creer_polygone(c(10,10,90,90), c(30, 70, 70, 30)) ## Une permutation cyclique des points donne le même polygone carre <- creer_polygone(c(10,90,90,10), c(70, 70, 30, 30)) ## En revanche, le code suivant ne définit pas un rectangle, ## mais un polygone dont les arêtes se croisent. papillon <- creer_polygone(c(10,90,10,90), c(30,70,70,30)) ## pour finir, voici un losange. losange <- creer_polygone(c(50,10,50,90),c(30,50,70,50)) print(carre)
x y [1,] 10 70 [2,] 90 70 [3,] 90 30 [4,] 10 30 [5,] 10 70
3.3. Dessin d’un polygone
Vous pouvez dessiner un polygone avec la fonction plot, lorsque celui-ci est donné sous la forme décrite précédemment.
plot(carre, type='l') lines(papillon -1, type='b', col='firebrick') lines(losange, type='l', col='darkblue')
4. Génération de polygones
Tous les polygones que l’on demande de générer doivent être sous la forme matricielle définie en section précédente.
4.1. Polygone régulier
Pour rappel sur les propriétés de ces polygones, il est conseillé de jeter un oeil à l’adresse: https://fr.wikipedia.org/wiki/Polygone_r%C3%A9gulier.
Définir une fonction reg_poly <- function(n, r=1) { ... } qui prend en argument un entier n, un réel strictement positif r (de valeur 1 par défaut), et qui renvoie un polygone p vérifiant:
- le polygone
pancôtés, - il est inscrit dans un cercle de centre
(0,0)et de rayonr.
Indications:
- Tous les sommets d’un polygone régulier peuvent être engendrés à partir d’un seul sommet et les images successives d’une rotation: quel est l’angle de cette rotation ? Donnez-le en radians et en fonction du nombre
nde côtés du polygone. - Quelles sont les coordonnées cartésiennes
(x,y)d’un point dont les coordonnées polaires sont(r,theta)? - Tester votre fonction
reg_polyen dessinant un exemple de polygone régulier (vous pouvez utiliser la fonctiondessin_polygonedéfinie précédemment).
4.2. Polygone surprise
Quelle figure obtient-on lorsqu’on définit le polygone suivant ?
x <- c(0,0,9,11,11,9,8,11,9,6,3,3,8,9,9,8,2,2) y <- c(0,12,12,10,7,5,5,0,0,5,5,7,7,8,9,10,10,0) surprise <- creer_polygone(x,y) plot(surprise,col="black", type="l")
5. Approximation de l’aire d’un polygone simple
5.1. Tirer un ou plusieurs points uniformément au hasard dans un rectangle
- Dimensions d’un rectangle
Définir une fonction
boitequi prend en argument un polygone donné sous la forme d’une matrice (comme précédemment) et renvoie une matrice contenant l’abscisse minimale du plus petit rectangle contenant ce polygone, son abscisse maximale, son ordonnée minimale et son ordonnée maximale. Par exemple:print(losange) bo <- boite(losange) print(bo)
x y [1,] 50 30 [2,] 10 50 [3,] 50 70 [4,] 90 50 [5,] 50 30 x y min 10 30 max 90 70 - Tirage de points uniformément aléatoirement dans un rectangle
Définir une fonction
points_aleatoiresqui prend en argument un couple(n, bo), oùnest un entier etboune boîte rectangulaire, et renvoie une matriceMcontenantnpoints tirés uniformément au hasard dans le rectangler=[xmin;xmax]*[ymin;ymax]. Plus précisément, la matriceMest de taillen*2et chaque ligne contient un point tiré uniformément au hasard dans le rectangler. Par exemple:bo <- matrix(c(3, 5, 6, 8),nrow=2, dimnames=list(c("min","max"), c("x","y"))) pts <- points_aleatoires(5, bo) print(pts)
x y [1,] 3.258553 7.597769 [2,] 4.720517 7.375495 [3,] 4.828405 7.450762 [4,] 3.775091 7.941043 [5,] 3.278946 7.821924
5.2. Un point donné est-il à l’intérieur ou à l’extérieur du polygone ? HARD
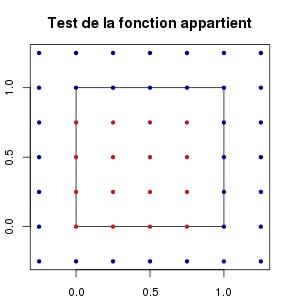
Définir une fonction appartient(points, polygone) qui prend en arguments des points et un polygone, et renvoie pour chaque point TRUE si le point est à l’intérieur du polygone, FALSE sinon. On pourra s’appuyer sur une fonction auxiliaire appartient_poly(point, polygone) qui prend en arguments un point et un polygone, et renvoie TRUE si le point est à l’intérieur du polygone, FALSE sinon. On ne se souciera pas du résultat renvoyé par la fonction dans le cas où le point appartient à un des côtés du polygone. En théorie, les points seront tirés uniformément aléatoirement et la probabilité qu’un tel cas se produise sera nulle.
Indication: Lorsqu’un point est à l’intérieur d’un polygone, toute demi-droite partant de ce point possède un nombre impair d’intersections avec les côtés du polygone. Lorsqu’il est à l’extérieur, elle en possède nécessairement un nombre pair.
Vous pourrez utiliser le code suivant pout tester la fonction appartient.
## Réaliser un test de la fonction carre <- creer_polygone(c(0, 0, 1, 1), c(0, 1, 1, 0)) cc <- seq(from=-0.25,to=1.25,by=0.25) points <- do.call(rbind,lapply(cc, FUN=cbind, cc,deparse.level = 0)) pin <- appartient(points,carre); ## Dessiner le résultat du test par(mar=c(2,2,3,2)+0.1) plot(carre, type='l', main="Test de la fonction appartient", xlim=range(carre[,1],points[,1]), ylim=range(carre[,2],points[,2])) points(points[pin,1], points[pin,2], col='firebrick', pch=20) points(points[!pin,1], points[!pin,2], col='darkblue', pch=20)
5.3. Méthode de Monte Carlo et calcul approché de l’aire d’un polygone
- Principe
Pour calculer une valeur approchée de l’aire d’un polygone
p, on va utiliser la méthode de Monte Carlo. Cette méthode nécessite de trouver une forme géométrique rectangulaire contenant le polygone , dont on sait calculer l’aire, et dans laquelle on est capable de tirer des points uniformément au hasard. Détailler quelle forme géométrique va être utilisée ici.Donner la valeur approchée de l’aire du polygone en fonction de:
- la proportion du nombre de points qui sont dans le polygone, et
- l’aire de la boîte rectangulaire
- Mise en oeuvre
Définir une fonction
mc.polyqui prend en argument un entierncorrespondant au nombre de points à tirer au hasard et unpolygone, et qui renvoie une valeur approchée de l'aire du ~polygonepar la méthode de Monte Carlo.print(mc.poly(10, losange)) print(mc.poly(1000, losange)) print(mc.poly(10000, losange))
[1] 1280 [1] 1606.4 [1] 1622.4
- Dessin d’une simulation
Définir une fonction
dessin_simuqui prend en argument unpolygone(sous forme d’une matrice) et despoints(une matrice) et les dessine. Une alternative consiste à définir un argument booléen optionnelDRAWà la fonctionmc.poly.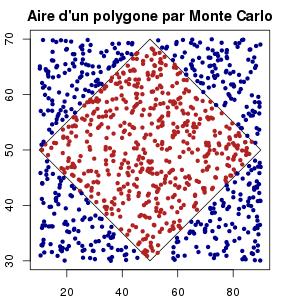
6. Calcul exact de l’aire d’un polygone simple
6.1. Exemple
Deviner l’aire du carré :
print(mc.poly(10000, carre))
Vérifier par le calcul que votre résultat est satisfaisant pour le losange et la carré.
6.2. Aire exacte d’un polygone simple
- Explication de la formule
Donner la formule permettant de calculer l’aire d’un polygone simple (quelconque). Expliquer cette formule à l’aide de phrases et d’un dessin.
- Programmation
Définir une fonction
aire.polyqui prend en argument un polygone et calcule son aire exacte.Par exemple:
print(aire.poly(surprise)) print(mc.poly(5000,surprise))
[1] -71 [1] 69.1944
L’aire du polygone est négative, car les sommets sont donnés dans le sens anti-trigonométrique (celui des aiguilles d’une montre).
7. Simulations : aire approchée versus aire exacte
Définir un ou plusieurs polygone(s) (par exemple en utilisant la fonction reg_poly), calculer une aire approchée à l’aide de la fonction mc.poly, et l’aire exacte à l’aide de la fonction aire.poly. Comparer les deux valeurs. Faire différentes simulations, en faisant varier le nombre de points utilisés pour approximer l’aire. Représenter vos résultats.
Indication: pour la représentation des simulations, vous pourrez vous inspirer de la première partie du TP/projet, sur l’approximation du nombre π.
8. Plus de polygones réguliers BONUS
Cette section généralise la fonction reg_poly.
Redéfinir la fonction reg_poly qui prend maintenant en argument un entier n, un réel strictement positif r (de valeur 1 par défaut), des réels x, y et alpha (de valeur 0 par défaut), et qui renvoie un polygone p vérifiant:
- le polygone
pancôtés, - il est inscrit dans un cercle de centre
(x,y)et de rayonr, - l’un des sommets de
pse trouve sur la droite passant par(x,y)et faisant un anglealphaavec l’axe des abscisses.
Indications:
- Tous les sommets d’un polygone régulier peuvent être engendrés à partir d’un seul sommet et les images successives d’une rotation: quel est l’angle de cette rotation ? Donnez-le en radians et en fonction du nombre
nde côtés du polygone. - Quelles sont les coordonnées cartésiennes
(x,y)d’un point dont les coordonnées polaires sont(r,theta)? - Tester votre fonction
reg_polyen dessinant un exemple de polygone régulier (vous pouvez utiliser la fonctiondessin_polygonede la section 4).
9. Utilisation de data frame BONUS
9.1. Représentation des résultats pour un polygone
Définir une fonction resultats qui prend en argument un polygone p, et renvoie un objet de type data frame, contenant des simulations obtenues à partir du polygone p. Par exemple, chaque ligne du data frame peut contenir:
- un nombre
nde points utilisés pour les simulations, - plusieurs estimations de l’aire de
p, chacune obtenue par une simulation avecnpoints, - le temps moyen mis pour obtenir ces estimations,
- l’erreur relative pour chaque simulation.
Représenter vos résultats à partir du data frame.
9.2. Représentation des résultats pour une liste de polygones
Le but de cette section est de créer un fichier .csv, qui contiendra les résultats obtenus pour plusieurs polygones. Il est conseillé de définir et d’utiliser des fonctions, plutôt que de représenter les résultats un par un.
Choisir une dizaine de polygones. Créer un data frame contenant, sur chaque ligne:
- un polygone
p(ou une référence à un polygone, tous les polygones étant par exemple stockés dans une liste externe), - l’aire exacte de ce polygone,
- pour différentes valeurs de
n(par exemplen=10**j, pourj=1:3):- la moyenne
mde plusieurs estimations de l’aire dep, chaque estimation ayant été obtenue par une simulation avecnpoints, - l’écart-type entre ces estimations,
- le temps moyen mis pour obtenir ces estimations,
- l’erreur relative entre la moyenne
met l’aire exacte.
- la moyenne
Exporter ce data frame dans un fichier .csv, afin de pouvoir le réutiliser par la suite.
Représenter certains de vos résultats (par exemple moyenne et écart-type) à partir de la lecture du fichier .csv.